Shubh Goel
Shubh Goel
Home
Projects
Publications
Light
Dark
Automatic
Projects
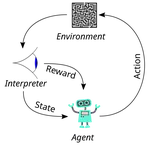
Learning Agent Behavior
Implemented DAGGER and Reinforce to learn an optimal policy in Hopper-v4 and Ant-v4 environments from OpenAI Gym
Code
Ant-v4
PandaPush-v3
State Estimation Using Kalman Filter
Developed a state estimation model using Kalman Filter to track the position and velocity of a plane, incorporating noisy measurements
Code
Rollerball
A Rollerball playing AI agent
Code
Medical Diagnosis
Implemented EM algorithm to learn Bayesian Network parameters
Code
Sports Complex Planning
Optimized sports zone allocation using various search algorithms
Code
DenoiseEEG
An End-to-End Deep Learning model to remove artifacts from raw EEG signals
Code
Cite
×